Système Cyber-Physique — Formation de Robots ()
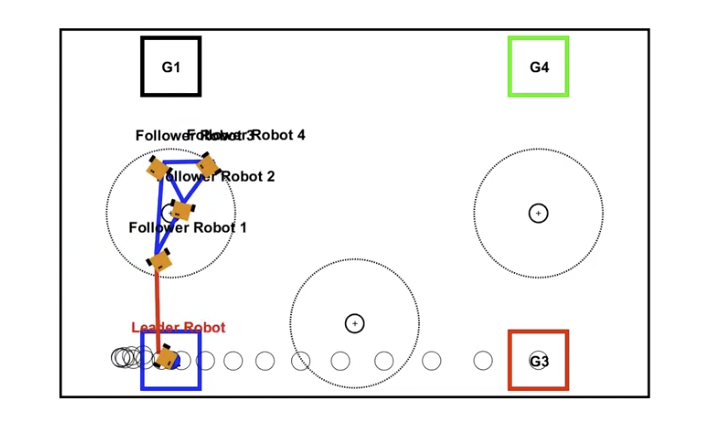
Système de coordination pour 5 robots autonomes maintenant des formations en losange ou en ligne tout en évitant les obstacles, développé en Matlab/Simulink. Note : 18/20.
Projet scolaire à l'UTC (Université de Technologie de Compiègne), en groupe de 3 étudiants. Développé en Matlab/Simulink. Le problème Cinq robots doivent tenir une formation (losange ou ligne) tout en évitant les obstacles. Deux objectifs qui se contredisent en permanence : éviter un obstacle, c'est casser la formation. Les briques • Contrôle de formation pour maintenir les positions relatives • Planification de trajectoire par splines, pour un mouvement fluide plutôt que des à-coups • Filtres de Kalman pour l'estimation d'état : savoir où sont réellement les robots à partir de mesures bruitées C'est l'estimation d'état qui rend l'évitement robuste : sans elle, les décisions se prennent sur des positions fausses. Note obtenue : 18/20.
Technologies
- Matlab / Simulink