Cyber-Physical Robot Formation ()
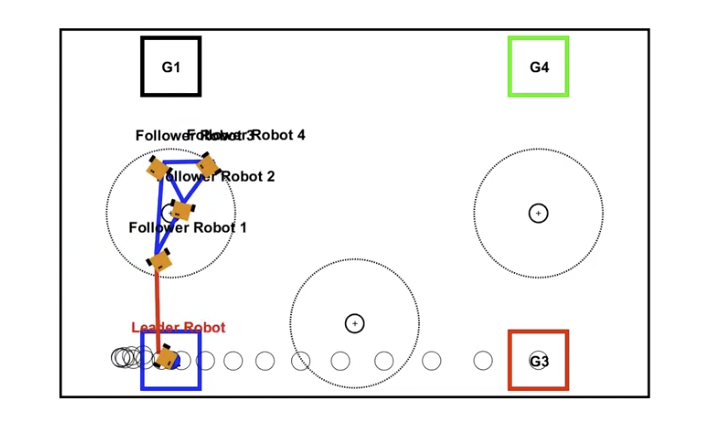
Coordination system for 5 autonomous robots holding diamond or line formations while avoiding obstacles, built in Matlab/Simulink. Grade: 18/20.
University project at UTC (Université de Technologie de Compiègne), in a team of 3. Built in Matlab/Simulink. The problem Five robots must hold a formation (diamond or line) while avoiding obstacles. Two goals that constantly contradict each other: avoiding an obstacle means breaking formation. The building blocks • Formation control to maintain relative positions • Spline-based trajectory planning, for smooth motion rather than jerks • Kalman filters for state estimation: knowing where the robots actually are, from noisy measurements State estimation is what makes the avoidance robust: without it, decisions are made on wrong positions. Grade: 18/20.
Technologies
- Matlab / Simulink